
Informations
Tout d'abord, le site contient beaucoup d'images. Celles-ci peuvent mettre du temps à charger.
Qui sommes-nous ?
Nous sommes en 2ème année en école supérieure en automatisation. Dans le cadre du cours de robotique, nous avons décidé de faire un tank télécommandé.
Nous ne nous limitons pas qu'à la programmation en C/C++ (Arduino) comme demandé, en effet nous développons aussi une application pour ordinateur ainsi que le site sur lequel vous vous trouvez actuellement.
Consignes
Purement pour le cours, nous devons respecter ces consignes :
- Robot mobile
- Télécommande => À réaliser avec un Arduino + Bluetooth + …
Comme composants que l'on doit intégrer il y a :
- Sonar (ultrason)
- Bras articulé (servo Moteur)
- Lecteur TAG RFID => Start en Mode « compétition »
- Afficheur LCD
- LEDs
- Buzzer (optionnel)
Où en sommes-nous ?
Nous avons un projet ambitieux ! Nous sommes motivés !
Pour savoir un peu où nous en sommes :
Arduino (tous) :
Robot :
Télécommande :
Application (Davide et Ugo) :
Site (Antonin) :
Equipe

Davide

Ugo

Antonin

Colin
Actualités
Dans cette section, vous pouvez admirer l'avancée du projet !
Vous pouvez voir toutes les étapes à la réalisation du robot.
C'est la rentrée pour certains mais pas pour les étudiants (enfin pas encore).
Néanmoins, c'est surtout la sortie de la vidéo ArduiTank !
Hé oui ! Tant attendue ! Reportée d'un mois car c'est une période qui demande pas mal de montage suite à la communication qui doit être faites pour les portes ouvertes (le 8 septembre de 17h à 20h pour notre section).
La veille, la vidéo sur YouTube et maintenant sur Facebook et Instagram également !
Bon visionnage !
Hé oui ! On est tellement "famousse" (oui on aime les mousses) que l'on est demandé pour un shooting photo/vidéo !
En fait, on a surtout été le meilleur groupe et pour notre professeur, il était important de promouvoir notre section.
Nous admirons le geste et sommes très content d'y avoir participé !
Nous en garderons de bons souvenirs !
Erreur 404, oups. Vous l'avez certainement déjà eue !
Différentes pages d'erreurs on été faites (401, 403, 404, 500).
L'occasion rêvée pour séparer notre fichier principal avec un include de header et des fichiers CSS (plus tout intégré dans un même fichier).
Ici s'achève le projet. Il vient d'être clôturer par une chouette présentation devant notre professeur.
Nous tenions à remercier notre professeur, Monsieur Costa, pour nous avoir suivi dans nos idées, laisser libre cours à notre imagination !
Une phrase que nous retiendrons pendant longtemps, nous ayant touché lors de la présentation du projet fini, dite par notre professeur : "Vous avez été au-delà de mes espérances."
Petit pincement au coeur pour ce projet qui existe depuis octobtre~novembre 2020 (soit bien avant le départ officiel).
Nous avons fait un groupe dont chacun a eu des spécificités à ajouter au projet. Rare sont les groupes qui avancent si bien avec un si bon esprit et une bonne communication et organisation. (Evidemment, tout n'était pas 100% parfait mais on a vite et bien avancé.)
Nous avons fini le projet mais qui sait... peut-être que l'on le continuera encore un peu.
En tout cas, de futures vidéos sont à venir (dont une qui était prévue pour la présentation mais malheureusement, nous n'avous pas eu le temps pour monter cette 3ème vidéo).
Entre temps, nous avons mis notre shooting photos/vidéos et les montages intégrés au PowerPoint (également juste en-dessous) dans la section galerie.
Nous tenions également à vous remerciez ! Que vous nous suivez depuis le début ou que vous soyez juste de passage, merci d'avoir pris le temps de nous suivre !
Arrive bientôt...
Pour avoir un assez bon roulement tout en ayant un bon maintient de toute la tourelle, nous avons modélisé et imprimé en 3D une bague.
Celle-ci vient se loger autour du collecteur à balais, soit entre la base du tank et la tourelle.
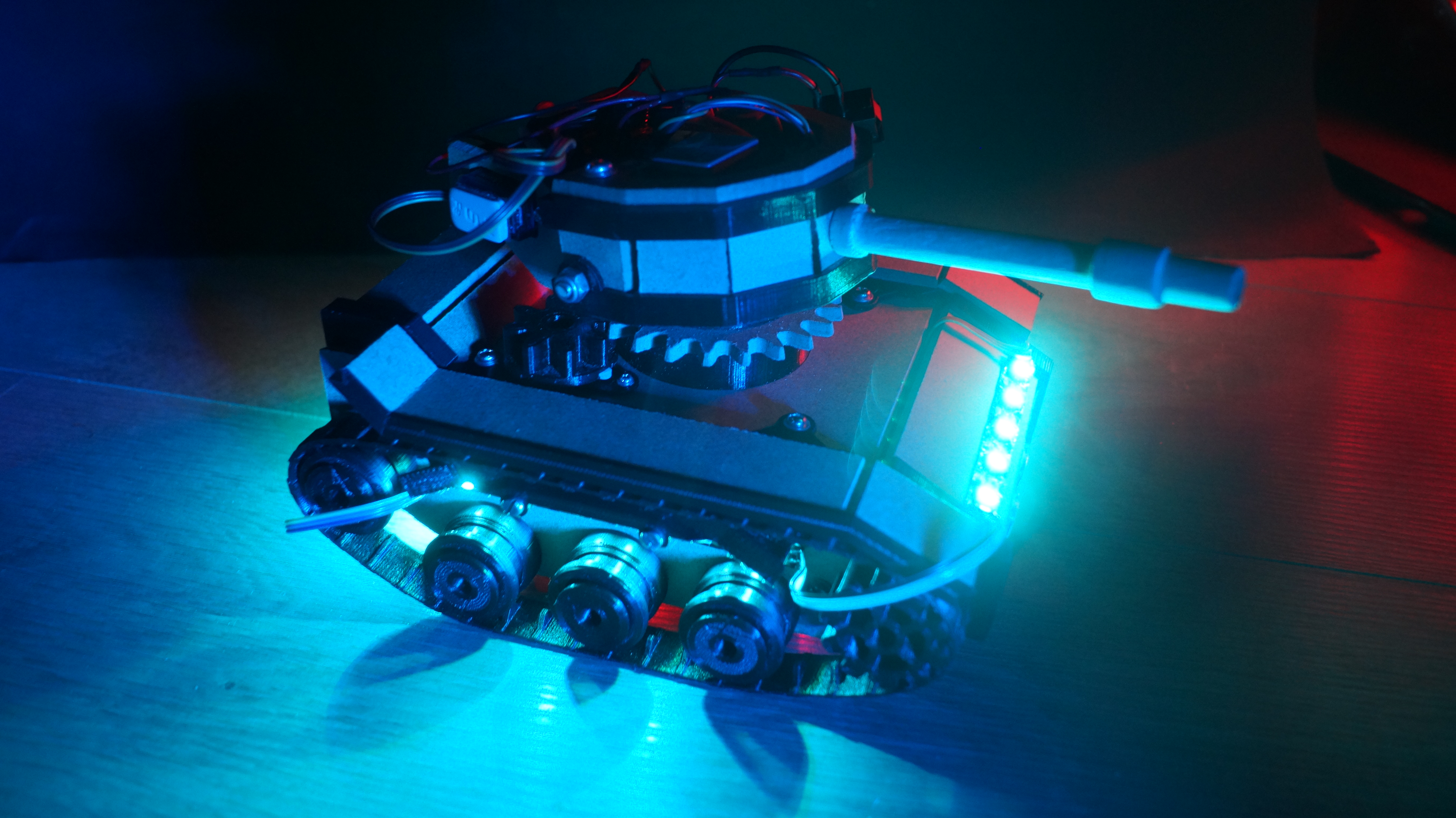
Nous en profitons pour réaliser et imprimer la pièce qui va maintenir tous les flancs de la tourelle et le canon aussi.
C'est cette partie qui va bouger avec le reste. Fixé sur un axe à la pièce précédement modélisée et imprimée (voir la précédente actualité).


Revenons à notre premier tank, le principale.
Cette fois c'est la modélisation et l'impression 3D de la pièce qui maintient le canon sur l'engrenage.

On ne vous l'a peut-être pas dit mais nous ne nous limitons pas qu'à un tank !
A la fin de l'année pour la démo, on espère en avoir deux.
Entre temps, Ugo a effectué également le trucage.
On devient des experts dans les trucages/"hackages".

Nous trouvions que malgré tout, la première modélisation 3D faisait une tourelle plus tank que robot humanoïde.
C'est pourquoi on partira sur plusieurs flancs verticaux au lieu de flancs en diagonales.


Nous voulions simuler ce que nous verrons.


Et enfin, modéliser le bord qui maintiendra les flancs et le dessus de la tourelle.


Forcément, après la base du tank, il fallait bien s'attaquer à la tourelle (c'est le cas de le dire).
Le but d'un tank c'est quand même bien de se défendre non ?
Nous nous sommes mis à réfléchir.
Je vous entends dire : "Ouais mais vous aviez déjà designé une tourelle". Effectivement mais la boule que nous voulions faire, même si c'était très mignon, aurait été imprimée totalement en 3D.
On aurait perdu le charme du bois. Nous avons donc commencé à designer une autre tourelle. Comment allons nous la faire ? Avec des arrondis, carrés, en pente, etc. Premier croquis :

Finalement, en modélisation 3D, une première idée nous est apparu dans nos esprits.
Nous voulons garder l'idée de la tourelle entière qui monte et descend. Comme un humain bougerait sa tête. Pour gardé l'esprit tank mais robot (humanoïde).



Vous en aviez marre de suivre les activités car pour en retrouver une précisément à une date c'est tout un bodel ?
Hé bien, nous zossie (aussi) !
Cela faisait un moment que l'on trouvait le système par date bien mais que cela serait mieux avec un sous-menu.
Chose qui fut faite grâce à un ami d'Antonin, Nenaff (pseudonyme).
Admirez vous-même le changement ! Bluffant hein ? Non, nous ne nous jetons jamais de fleurs 🙄


La machine Davide s'est remise en route à 3000 à l'heure !
À commencer par la réalisation 3D du support de l'ultrason.

S'en suit par l'impression 3D de ce support !



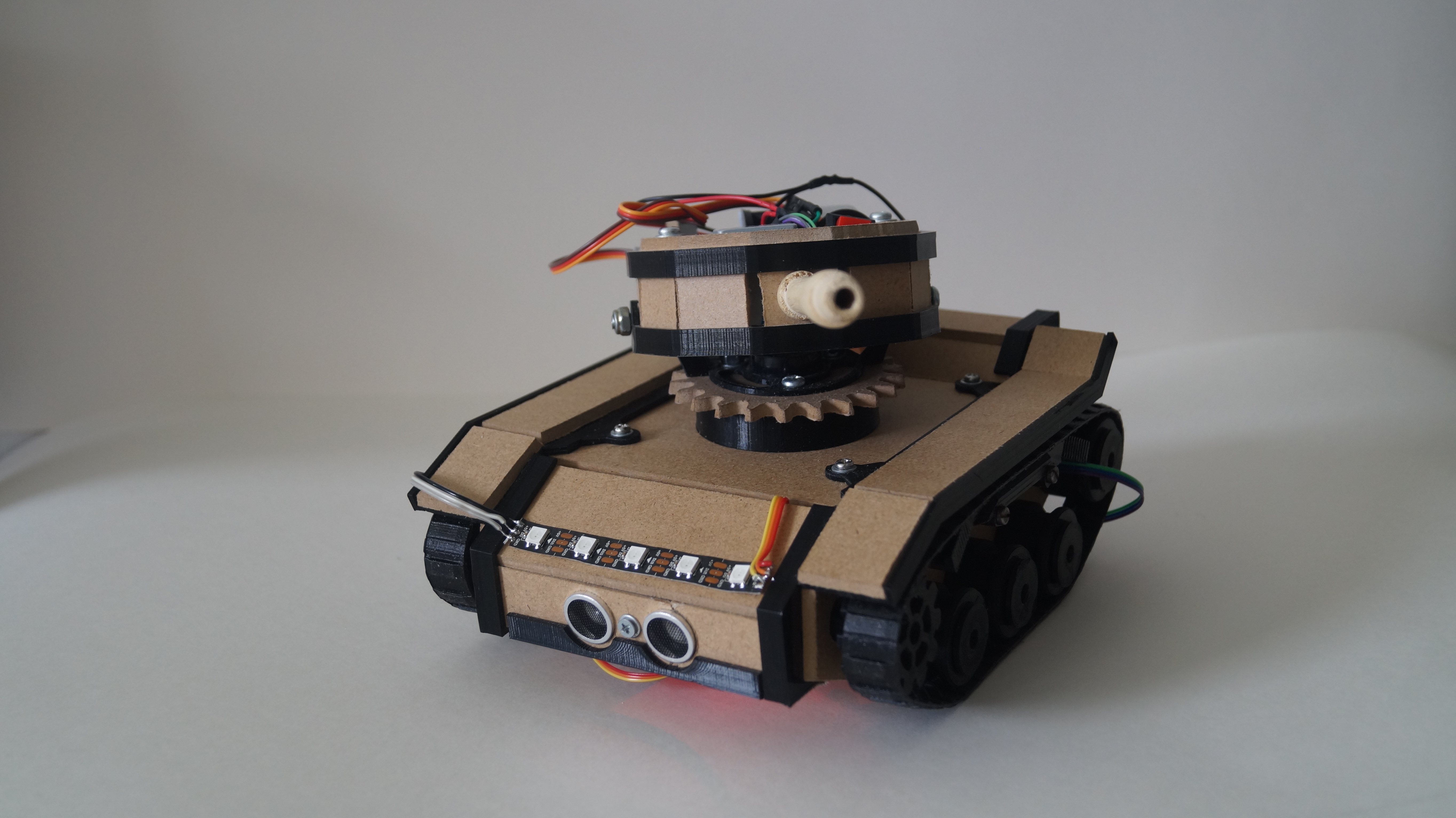
Après, place à la découpe de la planche de la face avant ! Sans oublier les trous pour les yeux du tank ! Ou plutôt les "haut-parleurs" de l'ultrason.
Et elle est PARFAITE ! ;) Notre tank prend forme ! Du moins pour la base.




Vous l'avez peut-être vu, la dernière plaque pour le devant est faite !
Effectivement, après une petite découpe à la CNC, la voici !
C'est une sacré bête ! Avec 359g (et c'est pas de la drogue, on ne serait plus là sinon).
Funfact : Le téléphone du papa de Davide a à peine 40g en moins ! Après c'est sûr que le tank est quasi vide et sans tourelle là !


Ugo a une plaque de cuivre une face. Il lui était venu de faire un PCB (circuit imprimé) de test pour la télécommande avec.
Pour crer le PCB, il a une CNC, le but aurait été d'enlever là couche de cuivre en retirant avec une fraise pour faire notre circuit.
Il s'agit d'une plaque une face, spécialement prévue pour faire des PCB à la CNC.
Je veux bien que nous soyons des fous mais quand même !


SPOILER : Nous ne l'utiliserons jamais au final 😅
Ugo a fait une impression 3D et a intégré le bouton ON/OFF pour la télécommande dedans.
Comme déjà dit, Ugo fait la télécommande avec l'écran tactile TFT et Davide fait le tank.
On allait quand même pas laisser Davide tout faire ! Non mais !
Il s'agit d'une des premières impressions sur l'imprimante 3D d'Ugo.

Même la nuit on continue ! (Même si c'est plus le matin, très tôt là du coup.)
On en avait marre de voir le site tout pété sur téléphone.
Après des jours de modifications et tests sans succès, nous avons fait appel à un ami d'Antonin, Nenaff (de pseudo) qui nous a débloqué de notre situation.
Les statistiques sont enfin bien mises. Tout le responsive est donc fonctionnel !
Fini les : "Je n'ai pas vu, c'est tout kc" :p
Même si personnne ne nous la dit.
Hé ouais on "hack" des servomoteurs nous ! Plus rien ne nous arrête (c'est faux).
En fait, nous n'avons pas besoin de savoir la positition de la tourelle et nous voulons que celle-ci puisse tourner à l'infini.
C'est pourquoi on démonte le l'armature du servomoteur pour se câbler directement sur le moteur. Nous laissons tout le reste tel quel, on ne sait jamais !
Ce sera comme si nous avions un motoréducteur simplement.


Création d'un petit code et hop, on test !
Comme vous l'avez peut-être remarqué dans la précédente actualité, nous avions encore les plaques pour les moteurs pas à pas.
On pouvait encore voir un moteur pas à pas qui y était rataché.
Tel des garagistes aguerris, nous avons démonté le moteur et les plaques. Puis nous avons placé les nouvelles plaques latérales !


Enfin, plus tard dans la journée, Davide a trouvé des vis assez longues pour pouvoir fixer les motoréducteurs.
Nous les avons attachés avec les impressions 3D qui vont maintenir les plaques de devant.




SPOILER : Nous ne sommes pas des garagistes. Qui donc vous aurait faire croire ça ? 🙄
Quand on disait que l'on n'arrêtait pas Davide...
La plaque dentée qui servira à faire tourner la tourelle grâce au servomoteur est donc modélisée pour la CNC de Davide.

Hé donc, plus tard dans la journée, la plaque tournante fut découpée et installée sur le tank !

Aquiquebouh ! En voila des moteurs prêt à faire décoller notre ArduiTank !
Malheureusement, il restera terreste même si on aurait bien aimé l'envoyer dans l'espace comme l'un de notre concurent (Tesla).

Qu'est-ce que l'on carbure !! On s'alimente peut-être à l'uranium haha !
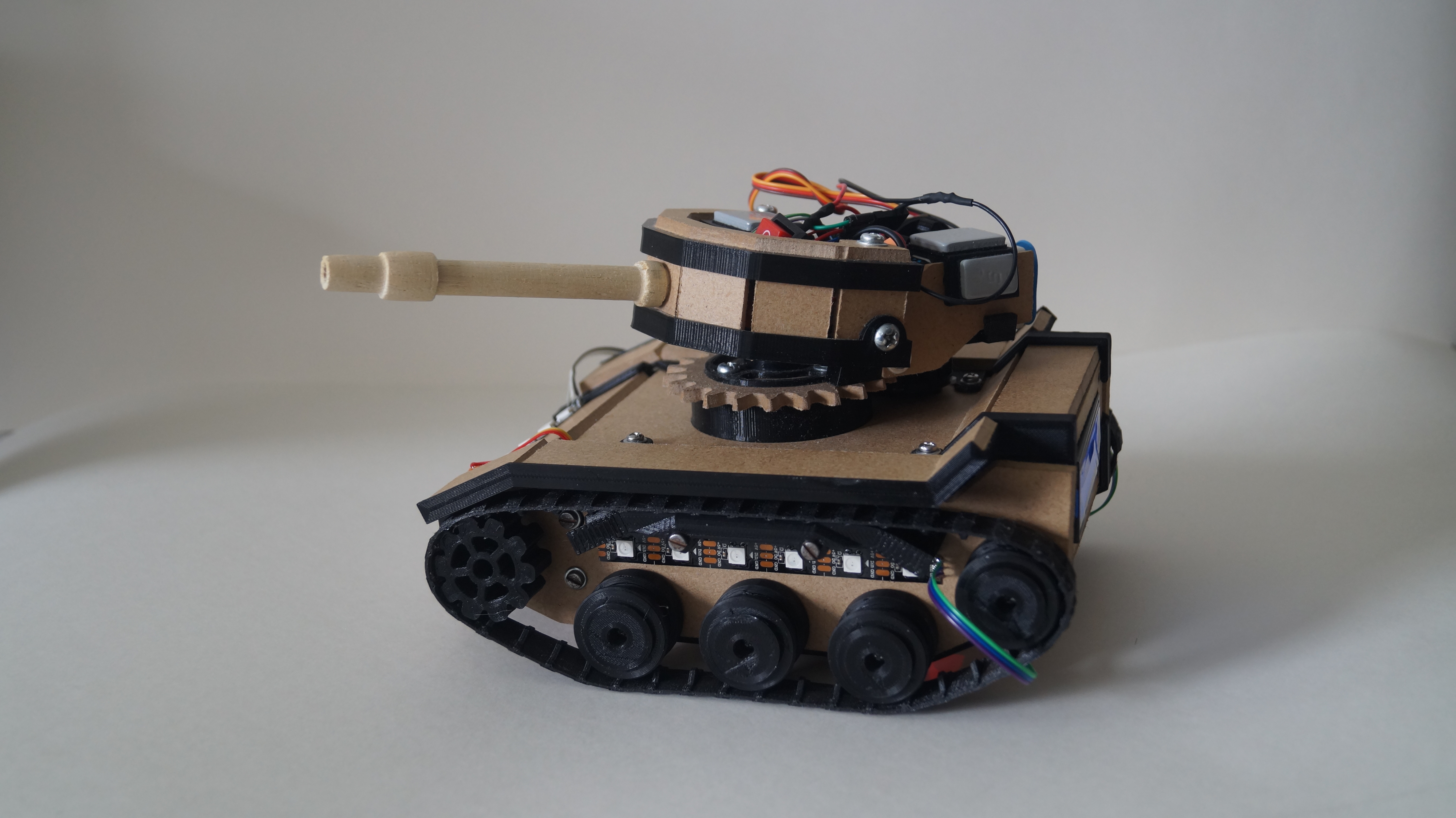
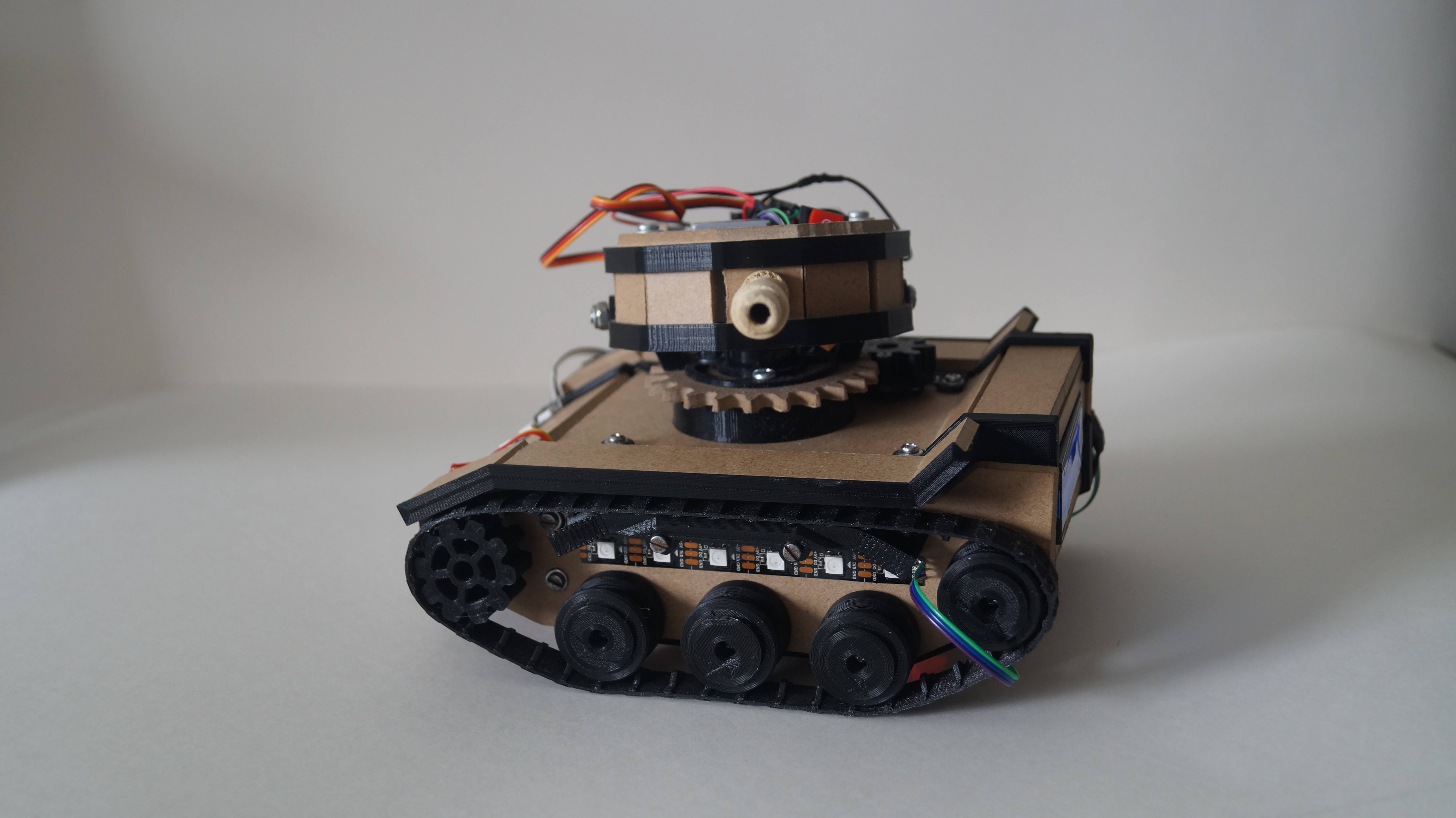
Ce qui est intéressant, c'est de s'attaquer à la tourelle ! (Le jeu de mot n'était pas voullu.)
Pour que la tourelle puisse tourner à droite ou à gauche, il faudra un servo avec un mécanisme d'engrenages pour que cela soit fonctionnel.
D'abord une pièce pour le servo qui sera une roue crantée, puis une pièce pour maintenir le roulement (axe centrale) dans la planche de bois de la base et enfin l'engrage qui fera tourner le roulement grace au servo et de la roue crantée.
Bon j'avoue, c'est pas simple de visualiser tout ça ! En plus l'engrenage ce sera pour un autre jour.
Voici donc en image la roue crantée qui est attachée au cervo.



Ensuite la pièce qui permet le maintient du roulement avec les fils dans la planche en bois.



Comme dit plus haut, l'engrenage qui s'emboitera dans le roulement et qui touchera la roue crantée sera pour le lendemain si tout va bien !
Ce serait bête d'avoir la pièce qui supporte les planches qui fermeront presque totalement la base du tank, en milieu de journée et de ne même pas usiner les fameuses planches !
Donc usinage des deux petites planches qui ferme l'arrière du tank.


On s'attaque à du lourd avec l'usinage de la planche principale du dessus de la base de ce tank.
On voulait quand même un minimum une planche sympa.



Une fois (mais pas deux !) ça qui est usiné, il faut la visser à la structure déjà existante !
On fixe quand même pour un aperçu car malheureusement les plaques des côtés vont devoir être refaites. En effet les motoréducteurs sont plus long et pas les attaches au même endroit que les moteurs pas à pas.
En image, l'avancée du tank avec la belle nouvelle planche de mise ainsi que "l'intérieur" du tank avec le peu d'espace disponible.



Le but est d'utiliser des Arduino (d'où ArduiTank (on ne sait jamais si vous êtes à la ramasse)) pour le projet sauf que c'est beaucoup trop simple pour nous, voyons ! Non, non c'est pas trop simple haha.
Nous comptons utiliser 2 Arduino nano sauf qu'on ne voulait pas avoir toute la carte car cela prend de la place et que nous voulons gagner de la place et tout mettre sur un PCB (circuit imprimé) pour que ce soit plus "propre".
Pour ce faire, nous enlevons le microcontrôleur de sa carte.
Une image vaut mieux qu'un long discours :

Ugo en train de faire de la magie noire avec son microcontrôleur. Non car j'ai rien compris moi. Soyons sérieux un moment : Il faisait un programme de test avec une led mais on dirait plus une bombe à désamorcer dans cet état.
Spoiler : Cela ne va pas rester comme ça ! Dommage hein ? Non, c'est vraiment pas beau, je vous l'assure !
La pièce disigné la veille part en impression ! Pour rappel, il s'agit de la pièce servant de maintient à toutes les planches supérieures du tank !
Supérieures physiquement mais en état de supériorité aussi car sans elles pas de tourelle avec canon ! Et donc pas de tourelle toute choupinou :p
Donc en image juste en dessous la première pièce ! La seconde (symétrie) imprimée juste après !


Cela aurait été trop facile que toutes les pièces soient imprimées sans encombre ! Nous avons eu une pièce qui n'a donc pas bien accroché.

Non c'est pas un flingue miniature ! Pas d'arme dans le tank ! Enfin si, un beau canon dans une tourelle mais c'est qu'un détail ça !
Après nettoyage et réimpression sans soucis cette fois, une belle deuxième pièce !


Antonin avance sur le site, l'HTML (structure) et le CSS (aperçu) est presque fini néanmoins le responsive (adaptation pour les différents appareils) n'est vraiment pas bon.
En cette soirée du 22 février, pas mal d'animations ont été faites en JS :
- Enfin les actualités ont les bords du dessous (droite et gauche) qui quand on clique sur le bandeau se mettent droit instantanément et si on referme, les bords se remettent en arrondis à la fin du "rembobinage" de l'actualité.
- La navbar (menu supérieur) est fixe sur le haut de la page. Si on descend dans le site, on la voit toujours.
- La navbar change de couleur et devient un peu transparente quand on dépasse la première image avec le logo dessus. (Fonctionne uniquement sur PC et tablettes suite au problème de responsive.)
Davide s'occupe de terminer la journée par la modélisation 3D de la pièce qui va maintenir la grosse plache du dessus, ainsi que les deux plus petites qui sont vers l'arrière.
Cette pièce maintiendra la planche de fond (avec le LCD) en place.

Cette pièce est très importante afin de maintenir la planche centrale du dessus qui aura la tourelle (et son poids) dessus.
Changement de programme (et physiquement aussi) !
Malheureusement, même si le moteur pas à pas prévu pour Arduino a un bon couple, il est néanmoins pas rapide du tout ! On change donc par un motoréducteur qui nous est fourni par le prof (mais nous avons acheté les notre).
Pas de chance ! Colin avait fait tout le code pour des moteurs pas à pas. Heureusement, une partie du code va pouvoir être gardé (enfin pour le moment).
Il y a par exemple la partie (dans le code) de la tourelle qui restera inchangée et les notions d'avancer, de reculer, de vitesse qui reste applicable aussi
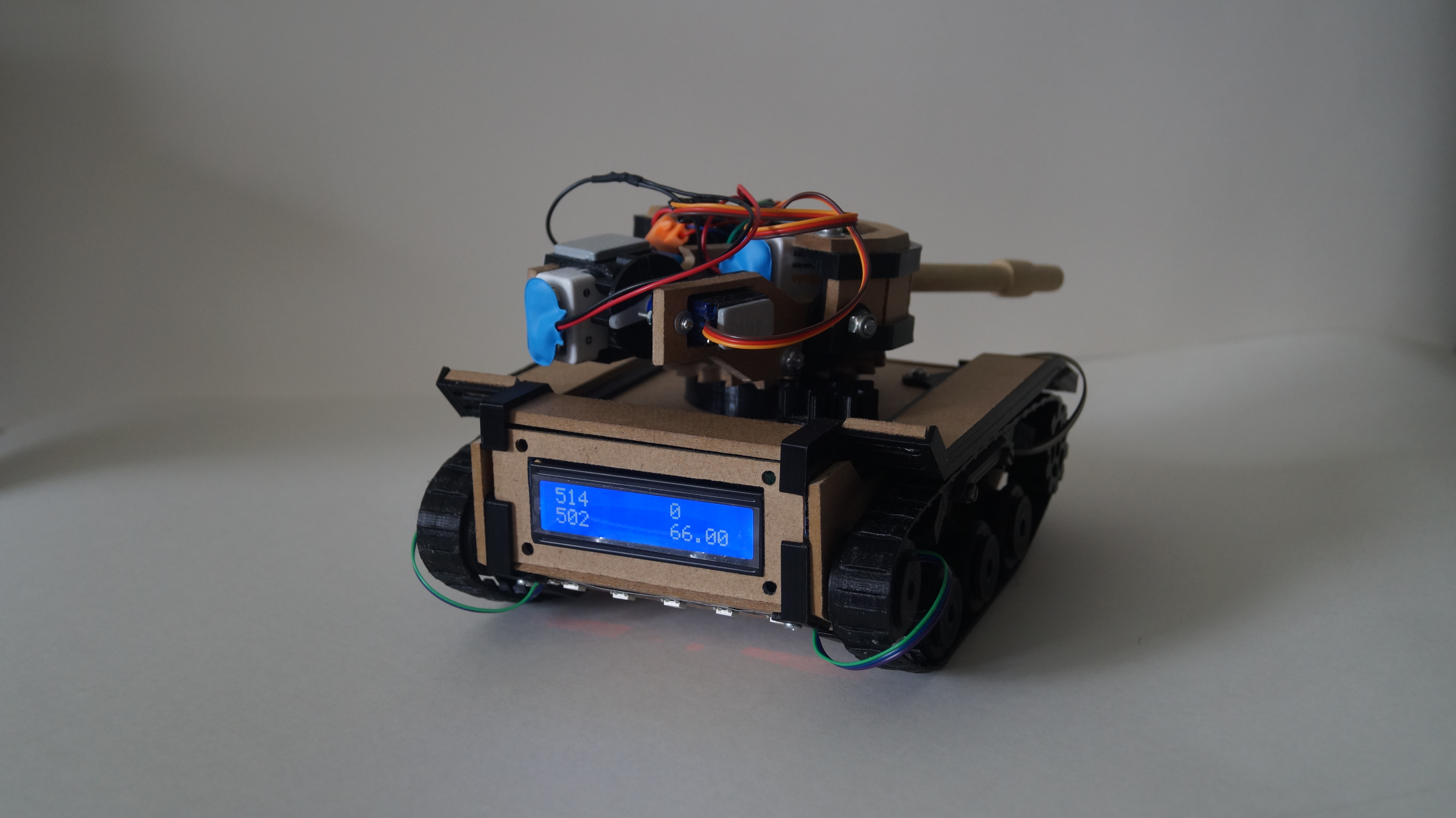
On continue avec la découpe de la planche du fond avec l'intégration de l'écran LCD (et pas LSD, d'ailleurs des écran LSD n'existe pas ! En auriez-vous pris ?).
Le projet avance vite ! On a déjà bien dépasser le planning mais on continue à fond sur notre lancée !



On aimerait aussi intégrer un ruban led pour que cela soit encore plus estétique.
Après réflexion, nous avons trouvé une solution pour fermer la télécommande en reliant les deux planches (bois et plexiglass).
Cela va être agréable à la vue est au touché normalement. On aura du bois pour le dessous, de l'impression 3D pour le coutour avec des arrondis, du plexiglass au dessus pour voir tous les composants.

On aimerait aussi intégrer un ruban led pour que cela soit encore plus estétique.
Et c'est partiiiii pour l'impression de la pièce qui va tenir les deux planches du fond du tank.


S'en suit l'impression de l'autre coin (symétrie) et des découpe à la CNC des deux planches à l'arrière.


Après la planche de fond du tank, pour que les deux flancs tiennent, il est judicieux de s'atteler à la modélisation 3D des "coins" qui permettent d'assembler les deux petites planche arrière du tank.
La modélisation le soir pour imprimer dès le lendemain matin !
La machine Ugo, elle aussi lancée, continue la télécommande avec l'aide de Davide.
Les travaux collossaux (à nos yeux) avance à pas de géants !
Après de longs moments de réflexion, nous avons gardé le design du plan 2D. Nous somme arrivés sur une base plus petite que la partie du dessus.
Cela permet une bonne prise en main comme vous pouvez voir juste en dessous. Il manque tout le bord mais ça c'est plus un prochain épisode...

On ne s'arrête plus !
Comme on est fan de notre projet, du groupe, du nom, de l'année, de la vie, de l'air, des particules qui nous entoures, des bosons de Higgs, ... - bon c'est possible que l'on soit un peu trop emballé - on a gravé notre nom et l'année sur la planche du fond du tank.
Comme ça c'est un petit souvenir permanent, gravé à la CNC.

La machine Davide est en route, on ne l'arrête plus !
Tous les maillons sont imprimés reste plus qu'à en faire une belle chaîne :

Bon, la chaine c'est bien mais il faut savoir la faire tourner si on veut avancer ! C'est donc au tour de la roue dentée à être imprimée !

Quand je disais que l'on arrêtais plus Davide... c'est pas pour rien !
Il a continué avec la CNC cette fois ! C'est vrai que c'est plus joli de voir en vrai, ce que ça donne avec un côté.
La chaine parait un peu courte, on rajoutera un maillon.


Le mouvement perpetuel Davide continue son cours ! Après un flanc, pourquoi pas 2 ?


Nous voici bien avancé pour la partie physique du robot, mais il n'y a pas que Davide qui a travaillé ! Regardez la partie plan 2D de la télécommande juste en dessous !
Pour Davide, comme on ne l'arrête plus, il a continué toute la nuit et voilà que le tank est désormais totalement terminé ! Non c'est une blague, faut quand même pas abuser !
C'est bien d'avancer côté robot/tank, mais la télécommande est également très importante !
Voici donc la réalisation en 2D de la télécommande qui servira à piloter le robot ! Celle-ci a été designée par Ugo.

Au même titre que "Pas de bras, pas de chocolat", ici c'est : Pas de télécommande, pas de robot tank !
Aïe aïe ! Coup dur ! C'était pas loin mais visiblement un soucis d'impression de la chaîne souple qui dévait être totalement impriméee en TPU.

Nous ne baissons pas les bras !! Mais afin d'éviter de perdre trop de temps sur le réglage pour du TPU, reprenons ce que nous savons faire, le PLA !
Le temps d'un redesign de la chaîne qui devient une multitude de maillons !

Forcément, on imprime pas une chaîne comme ça ! On aurait pu tenter mais ça aurait été risqué ! Nous avons fait maillon par maillon ! ;-)



C'est que cela prend forme tout ça !! Une nuit et tout sera imrpimé ! :p
Hop la boum ! La suite continue !
Davide est en forme et continue à modéliser tout ça !
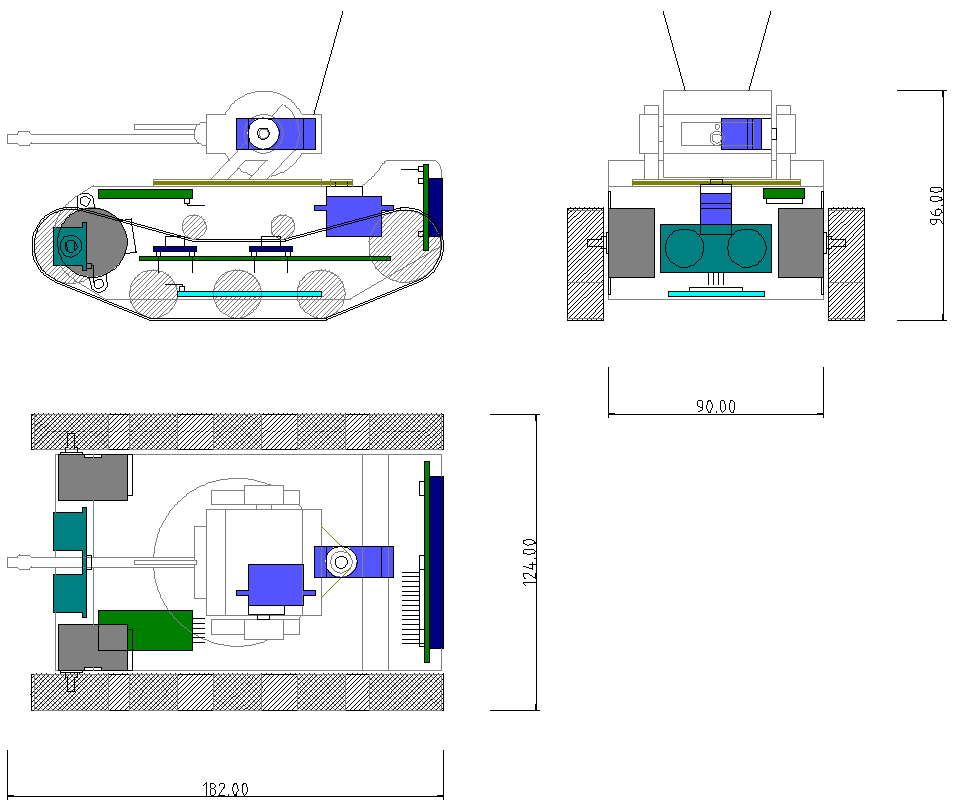
Les différents éléments électronique servant pour le robot sont importés dans Fusion 360. Nous retrouvons : le RFID, l'ultrason, le servo moteur, le moteur pas à pas et évidement l'arduino nano.
C'est également le moment de modéliser un des flancs du bas du tank. Le but est de fixer les roulements, chenilles, moteur pas à pas et autres pour pouvoir tester sommairement lors d'un test.
Le but de ce futur test sera de voir si le couple du moteur pas à pas sera suffisant pour faire tourner la chenille mais aussi pour avoir un minimum de vitesse possible !
On entame la modélisation 3D sur Fusion 360 !
Davide s'occupe de la réalisation des chenilles, engrenages et "roues".
Hâte de voir ça fonctionnel ! Pas vous ?
C'est ce jour que nous avons acheté arduitank.be chez OVH.
Nous avons donc activé l'hébergement lié avec l'offre.
C'est le début du développement site !
Ugo, pour l'interface (application) a développé un code qui utilise la détection de voix avec Google.
Nous allons l'implémenter afin de pouvoir donner des ordres au robot vocalement !
En voici un petit aperçu :

Arrive bientôt...
Galerie







Séance vidéos & photos










Statistiques
Contact
Par mail : Cliquez ici